Smart3D(ContextCapture)操作手册中文翻译3-块(Block)讲解
4.2块(Block)
一个Block区块项目包含了一系列影像和属性,包括传感器尺寸、焦距、主点、透镜畸变以及位置和旋转 等姿态信息,基于这些信息,可以建立一个或多个重建项目。
一副信息完整的影像就可以被用来进行三维重建。判断图像是否完整应遵循以下条件:
- 影像文件格式是否被ContextCapture支持(参见导入影像文件格式),并且文件没有损坏;
- 影像组的属性和姿态信息应满足(参见实用概念):
- 已获得精确数据;
- 与其他影像保持一致、连续和重叠;
为了满足以上两个条件,影像组属性和影像姿态信息必须由在同一Block区块下的不同影像整体经过联合优化运算而获得。一组联合优化运算的图像被称之为这个Block区块的主部件。
您可以通过两种方法获得一组完整的影像:
- 将影像导入Block区块中,并对影像组属性输入粗略精度参数,然后再利用Smart3D实景建模大师空中三角测量来估算完整的图像组属性和图像姿态。
- 从XML文件(参照导入区块)导入具有完整和精确影像组属性和影像姿态(比如从第三方空中三角 测量软件中获得)的影像。

Block区块项包含以下属性:
- ·Photos影像: 导入或添加的影像,以及相关的影像组属性和姿态(空中三角测量的运算成果或导入数据)
- Point clouds:从点云文件导入的点云
- ·Control Points控制点: 手动输入,控制点是可选项
- ·Tie Points同名点: 由ContextCapture自动提取生成 ,或者是导入的外部数据,以及用户自定义数据。
- ·Positioning Constraints位置约束::位置、旋转、缩放比例,基于用户定义的tiepoints进行设置。
- Additional data附加数据:用来辅助空三的数据
- 基于此区块的重建项目的列表
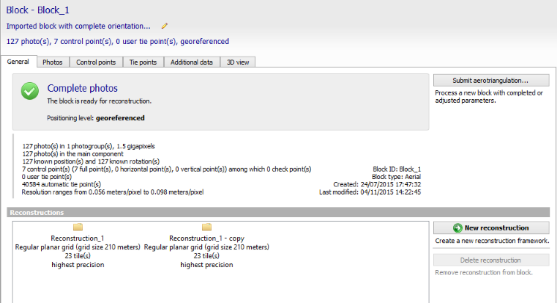
Block区块的General概述选项卡包含区块信息面板与Block区块重建列表。
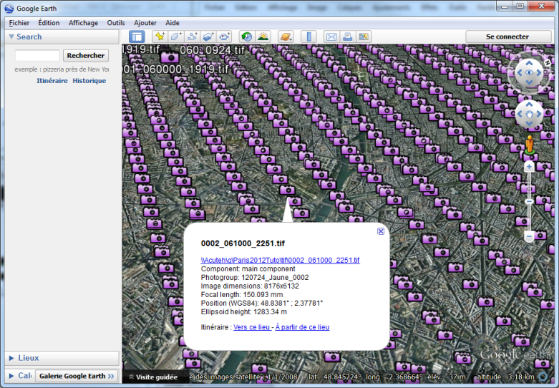
影像带有完整坐标及姿态信息的区块能以三维的形式在 3D预览选项卡中预览。
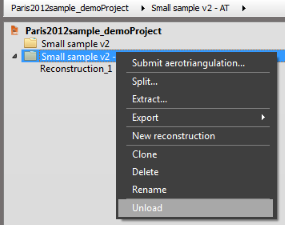
对于Block区块,能有以下几种操作:
- 导入区块: 从XML文件中导入区块
- 导出区块: 区块可以以KML或XML格式导出
- 拆分区块: 将较大的航飞区块拆分成较小区块
- 提取区块: 从区块中提取部分指定区块
- 加载/卸载区块: 从活动的工程中加载/卸载区块
注:区块下一旦建立了重建,图像、控制点与连接点属性将变为只读状态,不可再进行改动。如果确实有需要修改的情况,请使用“clone克隆区块"功能复制一个完全一样的区块,然后再进行编辑修改。
4.2.1 常规选项卡(General)
区块的General包含Block块信息面板与Block块重建列表。

Block仪表盘(Dashboard)
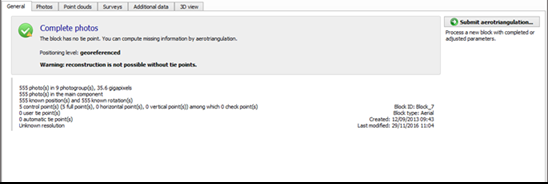
Block块的General选项卡包含了Block块概况以及可用工作流的信息。
空中三角测量随时能够重新解算或调整解算一个Block块的影像组属性或和影像姿态。
当空中三角测量正在处理区块中,Block块的General选项卡用于监控处理过程。
重建(Reconstructions)
管理Block块的重建列表。
![]()

创建新的Reconstruction
![]()

从Block块中移除被选中的Reconstruction
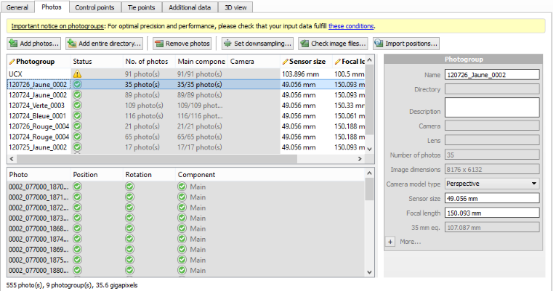
4.2.2 照片(Photos)
影像选项卡(Photos)用于管理一组或多组影像及其属性
注:Block块建立任意重建(reconstruction)后,影像选项卡(Photos)就会自动锁定为只读状态,无法再进行修改。

4.2.2.1添加照片(Adding photos)
为了获得最佳性能,照片必须分成一个或多个照片组。照片组是一组同质的照片,所有照片都是用相同的物理相机拍摄的,具有相同的内部方向(图像尺寸、传感器尺寸、焦距等)。如果照片是根据拍摄时使用的相机按子目录组织的,则ContextCapture可以自动确定相关的照片组。
另请参见准备图像数据集。
图像数据集的大小可能会根据您的版本进行限制。参见软件版本。


![]()
![]()
添加选定的照片文件。
使用shift或ctrl执行多重选择。


![]()
![]()
添加给定目录的所有照片(递归或非递归)。
此命令浏览所选目录并添加此目录中所有支持格式的照片。
另请参见输入照片文件格式。

![]()
从视频文件中提取帧并将其添加到块中。
请参见导入视频帧。

![]()
删除表中选定的照片或照片组。
使用shift或ctrl执行多重选择。
4.2.2.2照片组(Photogroups)
照片组属性(photogroup properties)
照片组属性定义相机的内部方向。三维重建需要对照片组属性进行精确估计。这些估计可以是:
•由ContextCapture空三自动估计,从一些从exif元数据派生的粗略估计开始,或使用ContextCapture相机数据库。
•导入(导入块时,或从相机数据库或从opt文件导入)。
•或手动输入。
多摄像机设备(Multi-camera rig)
指定照片组是否定义属于多摄影机装备的摄影机设备。支持选项为“无”或“主”。为了使多摄像头装备设置有效,块的所有照片组必须属于它,并且所有照片组必须满足该设置的要求。
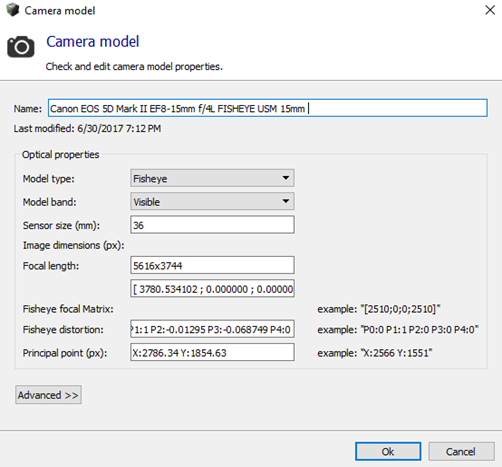
摄像机型号类型(Camera model type)
支持两种摄像机型号:
•透视:透视投影结合经典布朗变形模型,适用于直线透镜或低变形透镜。
•鱼眼:适用于广角或鱼眼镜头,镜头变形严重。
有关ContextCapture相机型号的详细信息,请参阅doc/contextCapture camera model.pdf。
摄像机模型波段(Camera model band)
支持两个摄像机型号波段:
•可见:标准的RGB照相机拍摄可见颜色。
•热红外:远红外摄像头捕获温度。
传感器尺寸(Sensor size)
ContextCapture可能需要知道摄像头传感器的大小。所需的传感器尺寸是传感器的最大尺寸。如果您的相机型号尚未在我们的数据库中列出,您将被要求输入此信息。如果您不确定您相机的规格,可以咨询Digital Photography Review或联系BentleySystems技术支持。
注意:当我们的数据库中没有列出相机型号时,接口建议向Entley Systems发送请求。我们将及时回复您的电子邮件,我们将在下一个ContextCapture版本的数据库中包含丢失的相机型号。
注:在某些特定情况下,可接受未定义的传感器尺寸,例如,如果从exif元数据中知道35mm等效局部长度。
焦距(Focal length)
对于新创建的照片组,ContextCapture通常可以从exif元数据中提取以mm为单位的焦距粗略猜测。否则,将要求您输入此初始猜测。稍后,ContextCapture可以通过航空三角测量自动更准确地估计焦距。
我们建议为每个照片组指定传感器尺寸和/或焦距。如果缺少这些属性,ContextCapture将假定35 mm等效焦距等于50 mm。如果正确的焦距值显著不同,则航空三角测量可能会失败。在这种情况下,需要手动指定初始摄像头。
对于鱼眼相机模型,由于定义了鱼眼焦距矩阵(见下文),焦距被忽略。
鱼眼焦点矩阵(Fisheye focal matrix)
对于照相机模型类型鱼眼,鱼眼焦距矩阵将覆盖焦距属性以模拟非对称鱼眼焦距。
不用于透视照相机模型。
主点(Principal point)
对于新创建的照片组,ContextCapture认为主点默认位于图像的中心。稍后,ContextCapture可以通过航空三角测量自动更准确地估计主点。
畸变(Distortion)
对于新创建的照片组,ContextCapture认为默认情况下没有透镜变形。稍后,ContextCapture可以通过航空三角测量更准确地自动估计镜头畸变。
不适用于鱼眼相机型号。
鱼眼畸变(Fisheye distortion)
鱼眼相机模型的畸变模型。
不用于透视照相机模型。
纵横比/倾斜(Aspect ratio/Skew)
像素不是正方形时使用的属性。
•歪斜:定义X和Y像素轴之间角度的系数。
•纵横比:如果像素不是正方形,则与1不同。
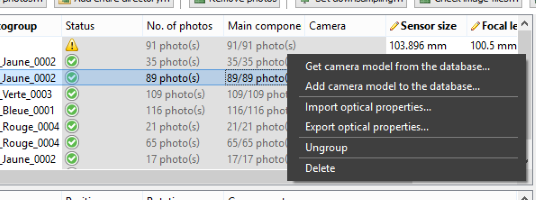
操做照片组(Manipulating a photogroup)
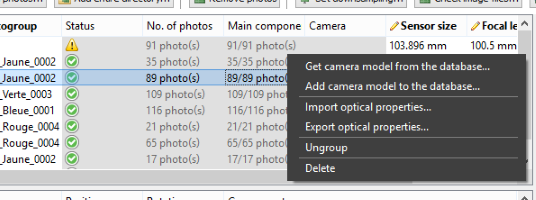
从相机数据库获取/添加到相机数据库
照片组的相机模型可以添加到相机数据库中或从中获取。

另请参见相机数据库。
导出/导入光学属性(Export/import optical properties)
照片组的属性(包括传感器大小、焦距、畸变和主点)可以导出并从opt文件重新导入。
此功能可用于重新使用相机校准。
要导入或导出光学属性,请在照片组上单击鼠标右键,然后从上下文菜单中选择“导出光学属性”或“导入光学属性”。
取消组合/组合照片组(Ungroup/group photogroups)
在某些特定情况下,必须独立地估计每张照片的相机内部方向:例如,如果照片是由相机设备拍摄的,或者在采集过程中焦距从一张照片到另一张照片略有变化(变焦镜头)。
在这种情况下,我们建议在将照片添加到ContextCapture之前准备数据集,方法是将每个照片放在不同的子目录中,以符合我们对照片组的一般建议。但是,也可以按原样添加照片并使用“取消组合”功能:选择表格中的所有照片组,右键单击并从上下文菜单中选择“取消组合”,以获取每张照片的一个照片组。
另请参见准备图像数据集。
4.2.2.3照片属性(photo properties)
照片(Image)
每张照片对应一个图像文件。
要编辑引用,请使用引用管理器(Reference Manager)。
姿势(位置/旋转)Pose (position/rotation)
照片位置和旋转定义了对照片姿态的估计。三维重建需要精确的照片姿态估计。这些估计可以是:
•自动从零开始计算,或通过航空三角测量通过contextcapture进行调整,
•从posemetadata初始化(见下文),
•或手动输入。
姿势元数据(位置/旋转)Pose metadata (position/rotation)
元数据位置和旋转定义了照片的已知姿态。此元数据可以从GPS标签、第三方数据、或在块导入过程中导入。
成分(Component)
照片的另一个属性是它的组件。只有属于区块主要组成部分的照片,即由联合优化产生的照片,如通过ContextCapture中的航空三角测量或第三方软件,才能用于三维重建。
遮罩(Mask)
可以将遮罩与照片关联,以在工作流中忽略图像的特定部分。有效的遮罩是一个与照片尺寸相同的黑白tiff图像。在三角测量和重建过程中,与遮罩的黑色像素相对应的照片像素将被忽略。
遮罩通过其文件名与输入照片关联:
•将遮罩与一张照片关联:对于名为“filename.ext”的照片,遮罩文件必须命名为“filename_mask.tif”,并放置在与相应照片相同的目录中。
示例:对于照片“img002564.jpg”,相应的遮罩应为“img002564_mask.tif”
•将遮罩与完整目录关联(需要相同尺寸的照片):如果存在于目录中,文件“mask.tif”将用作此目录中包含的所有照片的蒙版。
加载照片后,也可以从用户界面将遮罩分配给照片:右键单击要设置或清除附加遮罩的照片选择。
还可以参考(Masks)。
操作照片(Manipulating photos)
使用图像GPS标签(Use image GPS tags)
如果exif元数据中存在GPS标记,则会自动提取,并可用于地理参考生成的3D模型。
不完整的GPS标签将被忽略(带有经纬度坐标,但没有高度)。
添加带有完整GPS标签的照片后,您会发现GPS高度已使用海平面作为参考进行解释。单击“修改”更改最后添加的照片(海平面或WGS 84椭球体)的GPS高度参考。
另请参见定位数据。
从文本文件导入图像位置和旋转(Import image positions and rotations from a text file)

![]()
使用此选项设置以文本格式存储的第三方数据的图像位置和旋转。此导入是以XML或Excel格式导入整个块的替代方法。
“导入位置”按钮仅在块不为空时启用,因为此工具的目标是将块照片与文本文件中指示该照片位置的行配对。
有关详细信息,请参阅专门章节“导入照片位置”。
设置显示的空间参考坐标系(Set the displayed Spatial reference system)
对于地理参照块,使用此选项更改用于显示位置坐标的空间参考坐标系。这是一个不影响块属性的显示选项。
另请参见空间参考系。
降低照片采样(Downsample photos)

![]()
定义降采样率
降低照片采样率会减少要处理的信息量,并影响结果的质量。它可用于快速生成草图3D模型,或允许在硬件配置较低和/或软件版本有限的计算机上处理大型图像数据集。
应用照片采样率不会修改输入照片。
降低照片采样率是通过输入原始百分比来定义的。
降低照片采样率会影响结果的质量。
检查图像文件(Check image files)

![]()
检查图像文件的完整性
此工具测试所有的照片,以识别丢失或损坏的图像文件。
有两种检查方式:只检查图像文件头(更快),加载整个图像文件(较慢)。
为了方便起见,如果发现无效的图像文件,建议您将其从块中删除。
预览图像(Preview an image)
选择一张照片,然后单击“视图”以使用集成图像查看器查看照片。


关于图像质量
根据图像大小,图像查看器可以使用图像的压缩缓存副本。按“O”键加载原始图像。
关于图像预览
ContextCapture Master在后台生成照片缩略图以加速预览显示。
对于非常大的图像或从远程位置访问图像时,预览创建可能会减慢界面速度。在这种情况下,建议禁用预览。
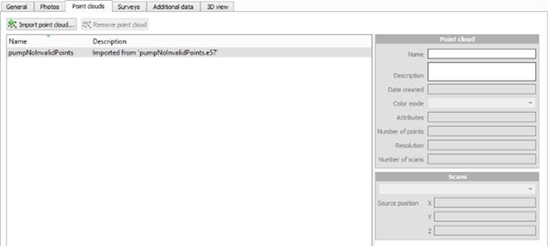
4.2.3 点云(PointClouds)
“点云”选项卡(Point clouds)允许您编辑或显示附加到Block的输入点云数据集。
注:在Block块中创建重建(Reconstruction)后,“点云”选项卡为只读。
导入点云(Importing point clouds )
限制:ContextCapture仅支持具有已知扫描源位置的点云。此外,如果导入点云中指定的扫描源位置不正确,将对三维重建产生不利影响,甚至导致完全不正确的三维重建。
根据您的版本,图像数据集和点云数据集的大小可能会受到限制。参见软件版本
静态扫描(Static scans )
可以导入以下文件格式的点云:
•ASTM E57文件格式(.e57)。
•Cyclone点云导出格式(.ptx)。
•指定扫描仪位置时,LAS/LAZ文件格式(.las,.laz)。
导入带地理参考位置的点云文件时,请在导入文件时指定空间参考系统。可以一次导入多个文件。
用户可以通过选中相应的选项来手动设置扫描仪位置。对于.las和.laz文件,手动设置扫描位置是必需的。手动设置扫描仪位置时,一次只能导入一个文件。
另请参见PointClouds技术规范。
移动扫描(Mobile scans )
支持以下移动扫描点云格式的导入:
•带有轨迹文件的ASTM E57文件格式(.e57)。
•带有轨迹文件的LAS/LAZ文件格式(.las,.laz)
轨迹必须作为单独的文本文件(.txt或.csv)提供,描述与时间相关的连续扫描仪位置。ContextCapture集成了文本文件导入向导,以提取各种文本格式的轨迹数据。
所提供的点云还必须包含正确附着到轨迹上的时间数据。
另请参见PointClouds技术规范。
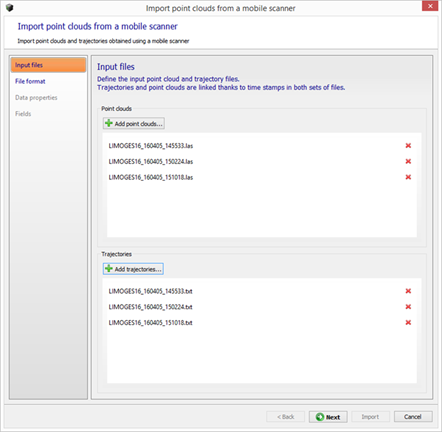

输入文件(Input files )
定义输入点云和轨迹文件。
轨迹和点云通过两组文件中的时间戳链接
文件格式(File format )
定义轨迹文件该如何读取
可以通过调整导入参数,使数据预览表中的每一列都是有意义的信息:
- 文件开头要忽略的行数:定义文件头的长度,导入时忽略。
- 分隔符:定义列分隔符。可以指定几个字符。例如,当使用空格作为分隔符时,也可以使用“组合连续分隔符”选项。
- 小数分隔符:点(123.456)或逗号(123,456)。
数据属性(Data properties )
从MobileScans导入带地理参考的点云文件时,请指定合适的空间参考系统。请注意,点云和轨迹必须位于同一空间参考系中。
字段(Fields )
为轨迹数据指定列的角色
必须将每个输入列与其相应的角色关联。
需要X(东距)、Y(北距)、Z(高度/海拔)和时间

管理点云数据(Managing point clouds )
点云由一组扫描成果组成,这些扫描成果对应于具有不同位置或轨迹的各种点云扫描数据源。

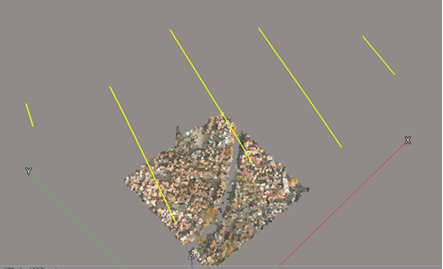
导入的点云位置数据可以通过3Dviewe面板查看:
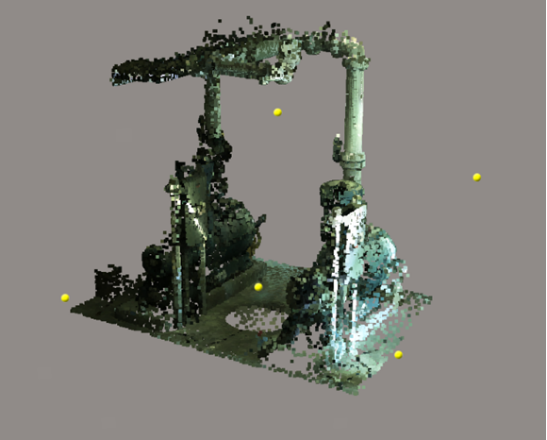

颜色模式(Color mode )
使用此属性,可以根据导入的点云中的对应属性选择点云三维显示和纹理化的颜色源用于重建的三维模型的
•使用颜色:使用RGB颜色值。
•使用强度值:使用强度值并将其映射成亮度。
•无:不使用点云颜色。
译者注:没有真实的应用过点云和倾斜结合的模型重建
4.2.4 调查数据:控制点(Surveys: Control points)
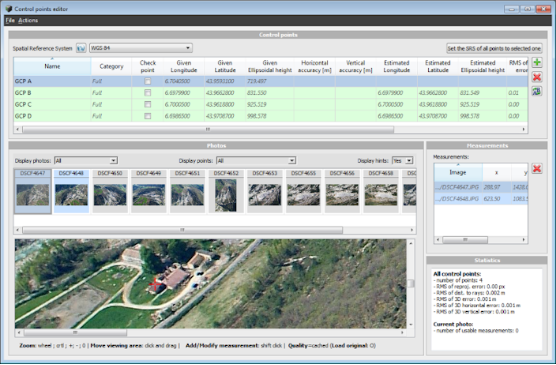
控制点选项卡(Control points)可以对区块的控制点进行编辑与浏览
注:一旦块(Block)的一些重建(Reconstruction)被创建,控制点选项卡则处于只读状态
控制点是在空中三角测量中辅助性的定位信息。对区块添加控制点能够使模型具有更加准确的空间地理精度,避免长距离几何失真。
控制点也可以被用来在空三后进行质量控制(quality control)
可以参考空三(Aerotrianglation)
有效的控制点集合需要包含3个或以上的控制点,且每一控制点均具有2张及以上的影像刺点。


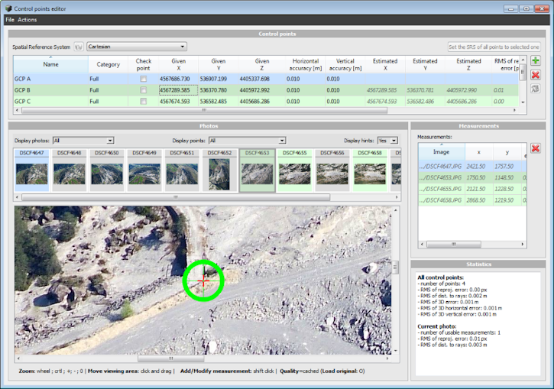
控制点编辑界面
译者注:建议第一次空三后再刺控制点(错误的控制点会可能导致空三失败)。空三后会可以自动识别和控制点接近的照片,降低刺点的工作量。另建议每一个控制点尽可能的包含多个角度的照片,每个角度两张。
译者注:对于控制点的坐标系统,按照采集控制点的坐标系统选择录入即可。控制点的坐标系统和照片的pos坐标系统,以及最终生成模型(Production)的坐标系统不混淆,ContextCapture可以自动转换的。
4.2.4.1控制点预览(Control points overview)
要快速浏览控制点,可以使用“块三维视图(Block 3D View)”选项卡或创建kml导出。
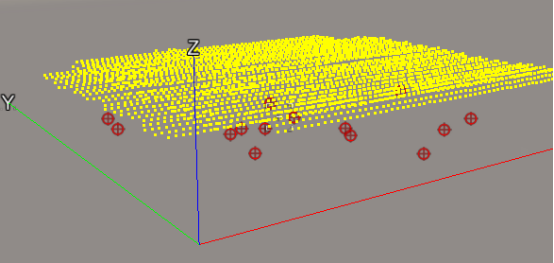
块三维视图(Block 3D View)
控制点在“块三维视图”选项卡中显示为红色或黄色目标。黄色目标表示航空三角测量使用的控制点。红色目标是在航空三角测量中未使用的控制点(检查点或小于两个测量值的控制点)。

导出到KML(Export to KML)
地理参考控制点可以导出到一个kml文件;然后您可以使用该文件在标准地理信息系统工具或Google Earth中可视化这些点。

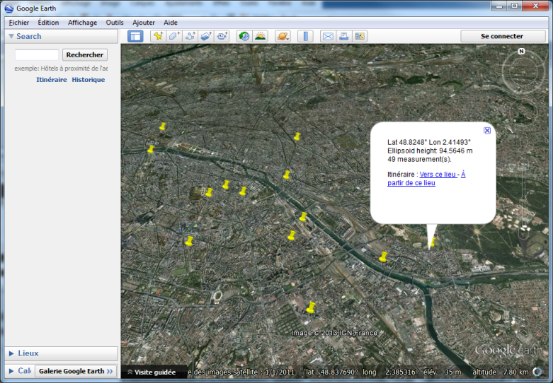
译者注:国内使用GoogleEarth不是很方便的朋友,可以考虑用LSV(LocaSpaceViewer)替代。除了导出控制点之外还能叠加最终处理的影像查看控制点。除此之外还可以通过照片生成轨迹,快速判断哪个照片在控制点附近。
4.2.4.1.1 控制点属性(Control point properties)
名字(Name)
控制点别名。
警告:对于地理参考控制点,如果您的空间参考系统没有特别指定垂直基准面,则必须指定椭球高,而不是海拔高。例如,对于WGS 84参考系统,必须输入椭球体高度;如果您的系统是WGS 84+NAVD88大地水准面高度,则必须使用海平面的高度。
有关更多信息,请参阅有用的概念。
类别(Category)
•完全使用(Full):xyz坐标(默认)。
•水平(Horizontal):仅使用X和Y坐标。
•垂直(Vertical):仅使用Z坐标。
检查点(Check point)
启用此选项是要仅使用控制点进行检查。在这种情况下,空三不使用此点作为控制点。
给定三维位置(Given 3D position)
在相应列中编辑给定三维位置的控制点。
坐标单位取决于选定的空间参照系:
•局部坐标系(Local coordinate system):任意单位,X、Y和Z的单位相同
•WGS 84:纬度和经度(单位:度),椭圆体高度(单位:米)。
•其他:x、y和高度(米)。
关于空间参考系(About the spatial reference system)
当添加控制点时,当前空间参考系统将与该点一起记录。如果稍后从组合框更改空间参照系统,ContextCapture将更新点的坐标以匹配新系统,但仅用于显示目的。
只有明确要求更改控制点的空间引用系统时,控制点的实际空间引用系统才会更改。
请注意,您必须在控制点对应空间参考系统中工作,才能编辑其三维位置。

![]()
使用所选点的SRS
从所选点设置当前空间参考系统(SRS)。
它不会影响现有点。使用此功能了解所选点的空间参考系统,或开始编辑三维位置。

![]()
将SRS设为所选点的SRS
更改所选点的实际空间参考系统(SRS)。存储的三维位置可以相应地转换,也可以保持原样。
水平精度(Horizontal accuracy)
输入控制点X和Y坐标的给定精度。
高精度控制点在航空三角测量中具有更大的权重。
垂直精度(Vertical accuracy)
输入控制点Z坐标的给定精度。
高精度控制点在航空三角测量中具有更大的权重。
4.2.4.1.2 照片展示选项(Photos display options)
使用这些选项可以在照片列表上应用过滤器,或者修改图像显示选项。
显示照片(Display photos)
如果块已经具有完整的照片组属性和照片姿势,则可以启用“可能查看此点的显示照片过滤器That might view this point”,以简化图像测量的定义。使用此模式,ContextCapture使用可用的定位数据筛选包含当前控制点的照片,并突出显示潜在的匹配区域。
注:在某些情况下,使用基于GPS标记的近似地理参考或在少数控制点上进行第一次航空三角测量可能很有趣,以便能够利用基于块方向的选择模式,然后更容易地获取整个控制点集。
基于块方向的显示照片过滤器适用于具有已知照片组属性和姿势的照片。
注意:使用此选择模式时不处理不完整的块照片。
显示点(Display points)
过滤显示的点:
•选定的一个(Selected one):仅将选定的点测量显示为红十字。
•图像测量:显示所选点以及当前照片中有测量值的所有点。所选点显示为红色十字,而其他点显示为绿色点。
•全部:显示当前照片中具有测量值的所有点;以及此照片的潜在匹配点(带白点)。
显示提示(Display hint)
突出显示潜在的匹配区域。
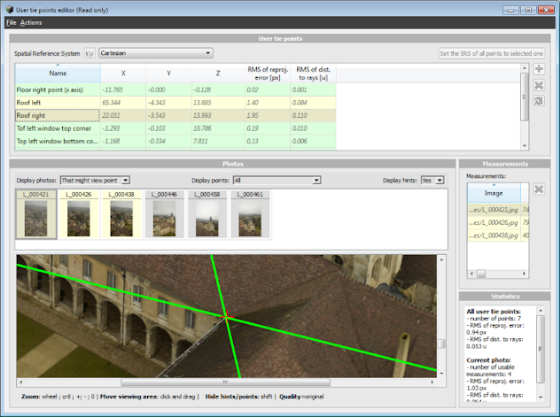
4.2.4.1.3 质量控制(quality control)
空三后,可以使用控制点编辑器来控制定位质量或识别错误。
您可以获得每个点、每个测量值、每个照片或全局统计数据的统计信息。
估计的三维坐标(Estimated 3D position)
有助于识别沿给定轴的漂移。
重投影误差(Reprojection error)
以像素为单位的重投影错误。
所有项目都根据此值(或此值的rms)着色,并遵循以下规则:
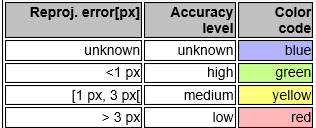

三维误差(3D error)
给定三维位置和估计三维位置之间的距离(以米(或单位)为单位)。
水平误差(Horizontal error)
给定三维位置和估计三维位置之间的水平距离(以米(或单位)为单位)。
垂直误差(Vertical error)
给定三维位置和估计三维位置之间的垂直距离(以米(或单位)为单位)。
4.2.4.2添加控制点(Adding a control point)
1.设置空间参考系(Set the spatial reference system)
在组合框中选择空间参照系。
“笛卡尔”系统可用于输入非地理参考控制点,例如在本地空间参考系统中。
对于地理参考控制点,在表中输入坐标之前,请选择所需的空间参考系统。
2.添加新的控制点(Add a new control point.)
单击“添加控制点” 在选定的空间参照系统中创建新的控制点。
在选定的空间参照系统中创建新的控制点。
也可以从一个ASCII文件中导入控制点及其3dPositions。另请参见导入控制点。
3. 设置控制点属性。
4.添加图像测量值(Add image measurements)
选择要在其上添加测量的照片,在照片中找到控制点位置,然后使用Shift+单击设置图像测量位置。

重复上述操作顺序以添加多个图像测量值。
4.2.4.3导入控制点(importing control points)
导入控制点有两种方法:
•使用块导入:控制点可以是块定义的一部分。另请参见导入块
•在“控制点对话框”导入控制点文本文件(菜单文件导入文件或菜单文件导入向导)
支持的控制点文件的一个基本示例是简单的TXT文件,其中列出了控制点的三维位置,XYZ坐标由一个空格分隔。
控制点文本文件示例:
GCP U A 315796.627695945 4869916.09237971 627.8
GCP U B 315332.029686681 4870703.80261219 738.9
GCP U C 315483.66078491 4870210.48269584 833.2
GCP编号315399.200463097 4871212.13895964 906.5
借助导入向导,您可以导入任何带有分隔符分隔值的格式,包括高级属性(如精度)。
导入控制点时,请确保选择了正确的空间参考系统(SRS)(请参见设置空间参考系统)。
4.2.5 调查数据:连接点(Surveys: Tie points)
连接点(Tie Points)选项卡允许您编辑或显示连接到块(Block)的连接点集,并优先该位置约束。
注意:在块(Block)中创建重建(Reconstruction)后,“连接点”选项卡为只读。
一个连接点对应于两张或多张不同照片中的像素,其中这些像素表示场景中同一物理点的投影。
ContextCapture可以在空三过程中自动生成大量的自动连接点。
用户连接点也可以从专用界面预先输入,以辅助空三。

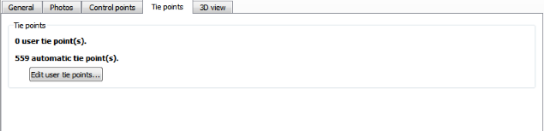

译者注:对应版本的帮助文档当中,此处配图应该有误,详见上图对比。
4.2.5.1 自动连接点(Automatic Tie Points)
自动连接点是在空三角过程中自动生成的导入照片之间的二维对应。

![]()
查看自动连接点(View automatic tie points)
打开自动连接点导航器,这是一个专用于自动连接点检查的界面。

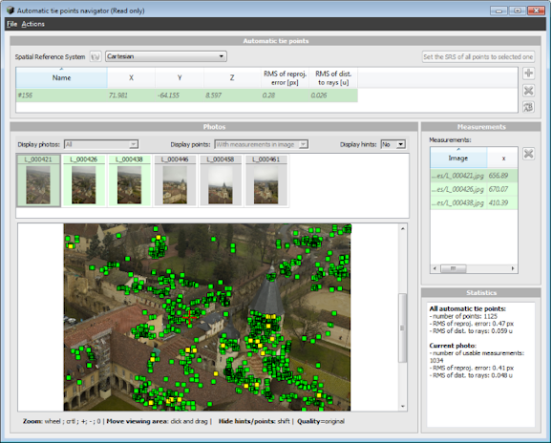
您可以获得每张照片的全局统计信息和单独统计信息。
您可以通过从当前照片中选择特定的用户连接点来分析它。浏览照片以检查连接点对应关系。
注意:除了上面的照片对应视图,自动连接点也显示为块三维视图选项卡中的三维点云。
4.2.5.2 用户连接点(User tie points)
用户连接点是通过可选的二维对应来对应未知的三维点。
在块体的三角剖分过程中,用户连接点可以提高三角剖分的精度,有助于在基线大、图形模糊的情况下进行三角剖分。
在大多数情况下,不需要用户连接点,因为ContextCapture使用自动生成的连接点足以完成工作。
用户连接点只能用于解决三角测量问题。在所有情况下,在添加用户连接点之前,我们建议运行第一次空三角。
改善照片位置(Improve photo position)
照片中的某些重复元素可能导致照片无法正确定位。
通过定义代表相同位置的点,无差别的照片,您可以引导空三角过程朝着正确的照片定位。
分组航空三角测量组件(Group aerotriangulation components)
有时,由于某些图像之间的基线或比例差异过大,航空三角测量无法连接所有照片。
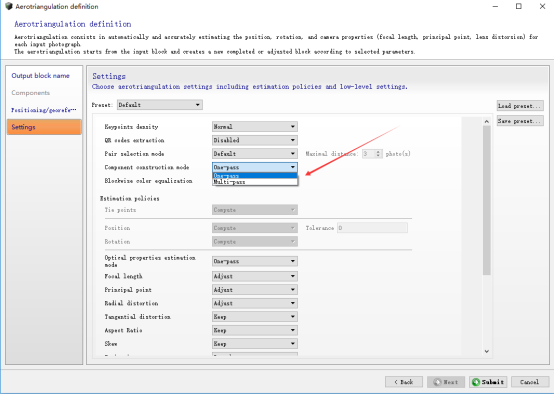
通过在图片集中定义用户连接点,多通道航空三角测量模式能够将图片缝合在一起。要启用航空三角测量多通模式,从空三角设置中,将“组件构造模式”设置为“多通”。
译者注:此处增加一张配图

必须在4个图像中定义至少3个用户连接点(要融合的每个组件中有2个度量)。
添加用户连接点会增加组件的连接机会,但连接永远不会得到保证。
添加块约束(Add block constraints)
约束是基于用户连接点的定位优先级。在空三角过程中通过约束对块进行刚性配准。
另请参见约束。
添加用户连接点(Adding user tie points)
请参见添加用户连接点。

照片显示选项(Photos display options)
使用这些选项可以在照片列表上应用过滤器,或者修改图像显示选项。
显示照片(Display photos)
如果块已经具有完整的照片组属性和照片姿势,则可以启用“可能查看此点的显示照片过滤器That might view this point”,以简化图像测量的定义。使用此选择模式,ContextCapture使用可用的定位数据过滤包含当前连接点的照片,并突出显示潜在的匹配区域。
注意:我们建议您进行第一次空三,以便能够利用基于块方向的选择模式。这将大大简化定义用户连接点的过程。
注:基于块方向的显示照片过滤器适用于具有已知照片组属性和姿势的照片。
使用此选择模式时,不处理不完整的块照片。
显示点(Display points)
过滤显示的点:
•选定的点(Selected one):仅将选定的点测量显示为红十字。
•使用测量图像(With measurement in image):显示所选点以及当前照片中有测量值的所有点。所选点显示为红十字,而其他点显示为绿点。
•全部(All):显示当前照片中有测量值的所有点;以及此照片的潜在匹配点(带白点)。
显示提示(Display hint)
启用极线显示以突出显示点位匹配区域。

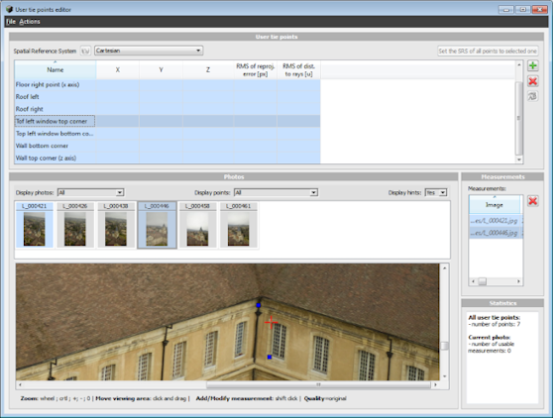
4.2.5.3 添加用户连接点(Adding user tie points)
1.点击编辑用户连接点,打开用户连接点编辑器界面。

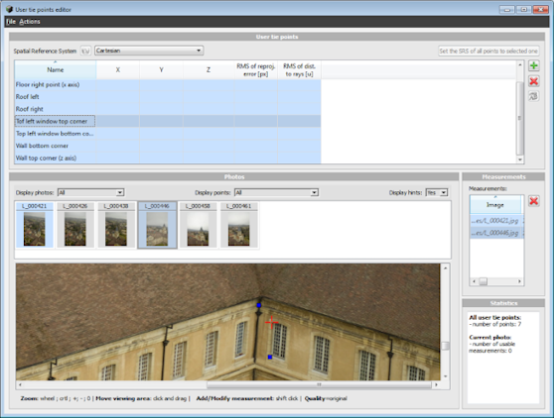
2.添加新的用户连接点。
单击![]() 添加用户连接点。
添加用户连接点。
可以重命名用户连接点。
注意:我们建议您对每个连接点使用一个明确的名称,以便于识别单个用户连接点(用于约束定义等)。
3.添加图像测量值(Add image measurements)
选择要在其上添加测量的照片,在照片中找到连接点位置,然后使用Shift+单击设置图像测量位置。
重复上述操作顺序以添加多个图像测量值。
4.2.6 调查数据:位置约束(Surveys: Positioning Constraints)
位置约束(Positioning constraints)是基于用户添加的连接点(TiePoints)的位置/旋转/缩放的调整。他们是用来在空三过程中进行严格的调整。
你可以组合使用位置/旋转/缩放的设置(平米以及Z轴)。
位置约束(Positioning constraints)在开启了使用基于用户连接点的位置约束(Use positioning constraints on user tie points)选项后生效。

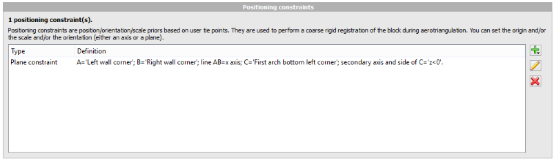

译者注:上图为没有添加连接点是的效果图,看标题原图应该也是老版本的截图
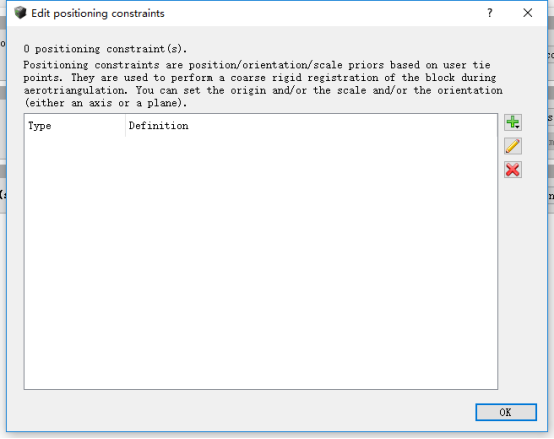
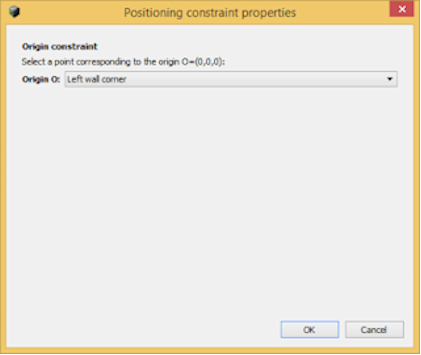
4.2.6.1 原点约束(origin constraint)
添加约束>添加原点约束(Add constraint > Add origin constraint)
如果存在其他原点约束,则不能添加origin constraint。选择与原点对应的点o=(0,0,0)。

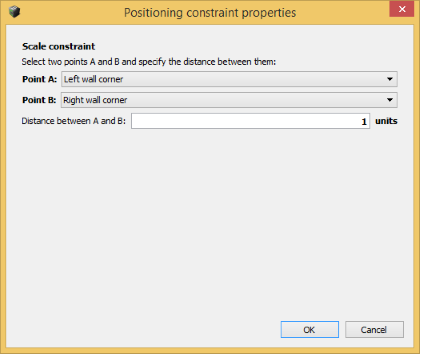
4.2.6.2比例约束(scale constraint)
添加约束>添加比例约束(Add constraint > Add scale constraint)
如果存在其他比例约束,则不能添加比例约束。
选择两点A和B并指定它们之间的距离。

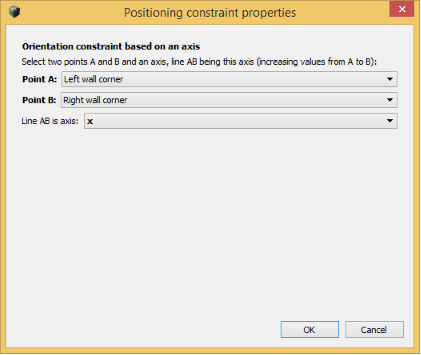
4.2.6.3 轴约束(axis constraint)
添加约束>添加轴约束(Add constraint > Add axis constraint )
基于坐标轴的方向约束
如果存在其他方向约束(轴或平面约束),则无法添加轴约束。
选择两个点A和B以及一个轴,直线AB是这个轴(将值从A增加到B)。

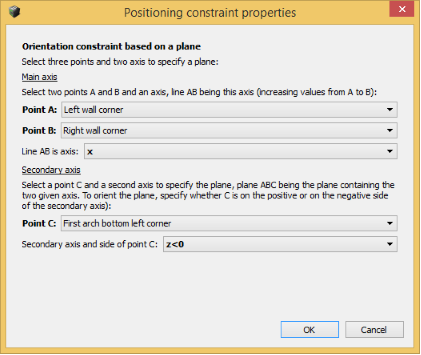
4.2.6.4 平面约束(plane constraint)
添加约束>添加平面约束(Add constraint > Add plane constraint)
基于平面的方向约束
如果存在其他方向约束(轴或平面约束),则无法添加平面约束。
选择三个点和两个轴以指定平面。

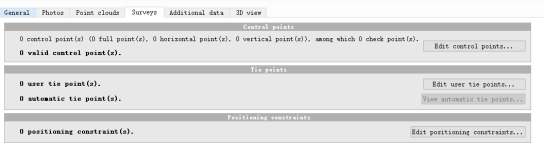
4.2.7 附加数据(Additional data)
“附加数据”选项卡(Additional data)允许您编辑或显示有关用于辅助空三的附加信息。
注:一旦块(Block)下有了重建(Reconstruction),该选项会变为只读

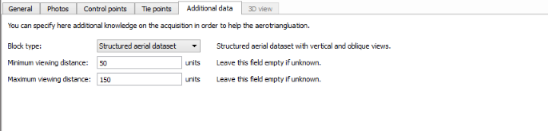

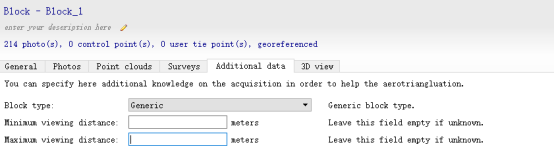
译者注:此处截图和当前版本不匹配,详见上图对比
块的类型(Block type)
此高级选项允许您指定一些典型的条件类型:
•通用(Generic):建议用于大多数图像数据集。
•垂直视角数据集(Vertical views only):建议使用仅由垂直角度构成的任何航空图像数据集(从顶部垂直下拍)。也称为nadir块(Block)类型。
•结构化航拍数据集(Structured aerial dataset):建议仅用于结构化航拍图像数据集,通过平行线规则的航拍获得垂直和倾斜视角的数据集,或者固定轨道的传感器获取的数据。又称倾斜(Aerial)块(Block)类型。
•围绕薄体结构环拍数据集(Orbit around thin vertical structure):建议对于薄体结构(远程通信电源、塔架、风力涡轮机等)环拍得到的数据集。也称为轨道(Orbit)块(Block)类型。
最小/最大可视距离(Minimum/maximum viewing distance )
允许指定可视距离的粗略估计:
•最小可视距离
•最大视距
如果您对视距的了解是适当的,请留有适当的缓冲(减少最小视距并相应增加最大视距)。
在已知照片位置的情况下,空三过程可以使用最小和最大视距来放弃对不在范围内的照片进行计算来提高效率。
4.2.8 3D视图(3D view)
“三维视图”选项卡(3D view)可以以可视化的形式查看输出文件(ContextCapture支持的格式)。
注:只有成果(production)格式是ContextCapture支持的格式时,该选项才可用。
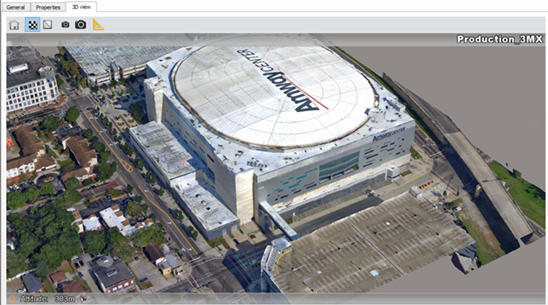

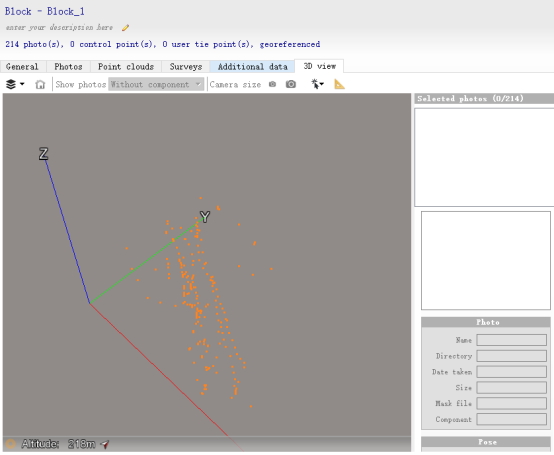


译者注:对于照片带位置信息的块(Block),可以在“三维视图”选项卡(3D view)查看照片的分布。默认情况下osgb的数据格式在不分块生成的情况下也是可以直接预览的。对于分块的不支持预览。当前版本的合并根节点(Acrosstile)功能,如果生成的是这种格式的模型也是可以直接预览的。原文放的图只是Production的3Dviewe,Block的3Dviewe如上面的两张图。
图层(Layers)
控制三维视图各项的可见性。您还可以加载和管理基础地图图层(另请参见基础地图管理器)。

![]()
缩放至初始位置
点击该按钮重置相机初始位置

译者注:此处更换了一个更易于区分查看的图
组成元素过滤器(Component filter )
如果该块(Block)有多个组成元素,请使用此组合框更改组件筛选器:
•全部:显示所有照片。
•照片主要组成部分(In main component):仅显示属于主组件的照片。
•不在主要组成部分的照片(Without component):仅显示不在主要组成部分的照片(主组成部分以外)。
相机大小
缩小或者放大相机
使用这些按钮调整相机的表现形式。
照片选择(Photo selection)

![]()
使用这些工具在三维视图中选择照片:
•简单选择:点击照片进行选择。
•矩形选择:绘制矩形以选择区域中的所有照片。
•按连接点选择:单击生成的连接点以选择此连接点中使用的所有照片。

可以使用shift、ctrl和alt键管理扩展选择的方式:
•SHIFT:添加到所选内容。
•ctrl:从选择中删除。
•alt:添加或删除所选内容。
导航(Navigation)
使用鼠标按钮进行3D场景漫游。
双击可将点击点放大并移动到中心区域进行聚焦在。
单击照片可显示详细信息。
对于具有完整姿态(位置和旋转)的照片,选择它们可以在显示其覆盖区域。

译者注:此处增加一张截图来更直观的表达。
关于照片预览(About image preview)
ContextCapture Master会在后台生成照片缩略图,以加速预览显示。
对于非常大的图像或从远程位置访问图像时,启用预览创建可能会有响应延迟。在这种情况下,建议禁用预览。
4.2.9 空三(Aerotriangulation)
为了进行三维重建,ContextCapture必须非常准确地知道每个输入照片组的照片组属性和每个输入照片的姿态。如果您忽略这些属性,或者您不知道它们是否具有足够的准确性,ContextCapture可以通过称为空三(有时缩写为AT)的过程自动计算这些参数。
空三基于块(Block),并生产一个计算好相关属性的新块(Block)。
空三会参考当前摄像机位置(例如,从GPS初始化)或基于地理参考控制点。
尽管ContextCapture可以在没有输入照片姿态初始信息的情况下完成空三,但不建议对大量照片进行计算;在这种情况下,没有任何初始位置信息的空三可能失败或者错乱。大数据集最好包括大概的姿态信息(例如INS),也可以通过XML或MS Excel文件导入。ContextCapture可以完成一个非常大的块(Block)的空三计算,块大小的唯一限制是计算机内存。
译者注:这也是为什么大面积的航拍会进行分块空三,有些单位具备Tb级的内存,而有些单位只能使用32G内存。可以根据实际情况考虑分块的方式。常规建议16G或者32G内存不要超过8000张照片。
4.2.9.1 通过空三创建一个快(Creating a new block by aerotriangulation)
从“块常规”Block General选项卡或项目树视图的上下文菜单中,单击“提交空三”以通过航空三角测量创建新块。

![]()
使用已完成或已调整的参数处理新块。
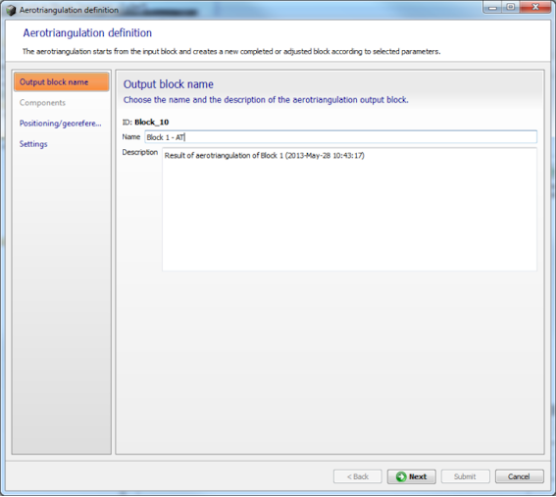
4.2.9.1.1 生成块的名称(Output block name)
选择航空三角测量输出块的名称和说明。

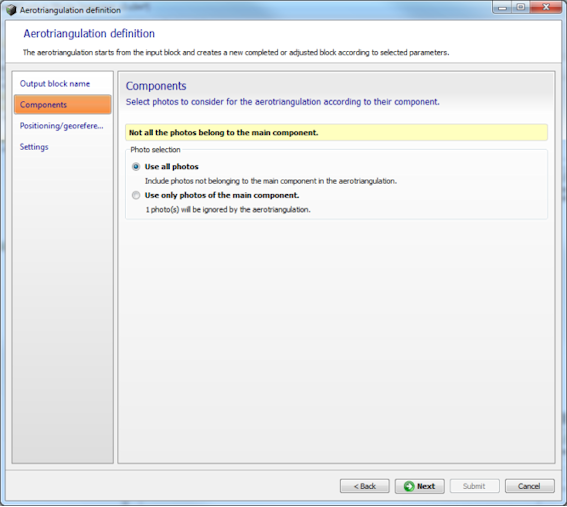
4.2.9.1.2 相关组件(Components)
根据组成部分选择要考虑的航三角测量照片。
只有当块包含属于不同组件的照片时,才启用此页。
选择要参与空三的照片:
•使用所有照片:包括不属于空三主要部件的照片。这可能有助于将新添加到块中的主要组件照片或以前的空三角飞掉的照片合并到其中。
•仅使用主要部件的照片:航空三角测量将忽略主要部件外部的照片。这可能有助于对与以前的航空三角测量成功匹配的一组照片进行新的精确调整。

4.2.9.1.3 定位或空间参考(Positioning/georeferencing)
选择空三应如何放置和标定块。

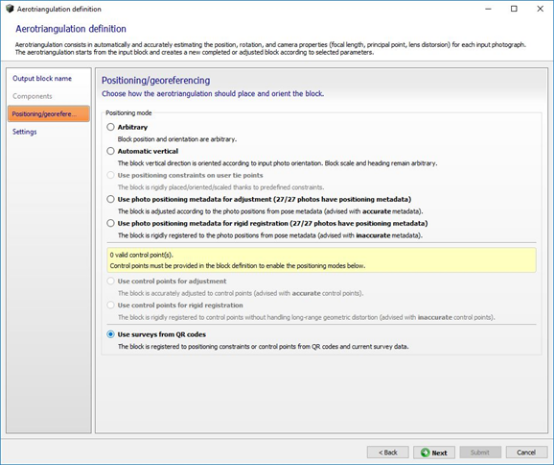
标定模式根据输入块属性启用:
•任意(Arbitrary):块位置和方向是任意的。
•自动垂直(Automatic vertical):锁定垂直方向根据输入照片方向确定。块比例和方向保持任意。
•在用户连接点上使用位置约束(Use positioning constraints on user tie points)(仅当输入块具有定位约束时才可用):由于重新定义的约束,块被严格地放置/定向/缩放。
•使用照片定位详细数据进行调整(Use photo positioning metadata for adjustment)(仅当输入块至少有3个具有定位元数据的照片时可用):根据姿势元数据中的照片位置精确调整块(建议是准确的元数据时使用此选项)。
•使用照片定位详细数据进行刚性配准(Use photo positioning metadata for rigid registration)(仅当输入块至少有3张带有定位元数据的照片时才可用):该块通过照片姿态元信息严格配准到照片位置(建议使用不准确的元数据)。
•使用控制点进行调整(需要有效的控制点设置)(Use control points for adjustment):块精确地调整到控制点(当控制点精度与输入照片的解决方案一致时建议)。
•使用控制点进行刚性配准(需要有效的控制点集)(Use control points for rigid registration):将块刚性注册到控制点,而不处理长距离几何变形(建议用于不准确的控制点)。
•使用来自QR codes(Use surveys from QR codes):块被注册到定位约束或来自QRCODE的控制点和当前其他附属数据。
对于使用控制点的配准模式,所选照片上需要一个有效的控制点集:至少有3个控制点的超过2个测量值。
了解有关使用特定ContextCapture QR码进行空三的ContextCapture QR code Creator的更多信息。
4.2.9.1.4 设置(settings)
选择空三的估算方法和高级设置。

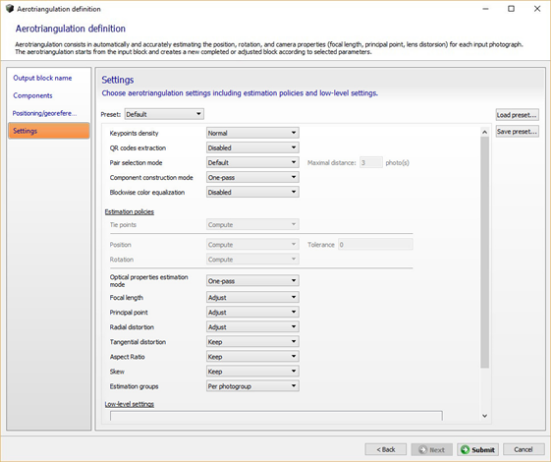
关键点密度(Keypoints density)
关键点密度值可以更改以管理特定的数据集:
•常规(Normal):建议用于大多数数据集。
•高(High):增加关键点个数,建议在物件纹理不足或照片较小的情况下匹配更多照片。此设置使三角剖分处理速度变慢。
我们建议您先尝试常规模式。
QR codes解析(QR codes extraction)
如果启用,将从图像中提取QR codes。将使用常规QR codes和ContextCapture用户连接点QR codes创建用户连接点。ContextCapture控制点QR codes将用于创建控制点。
匹配点选择模式(Pair selection mode)
可以使用不同的选择算法计算连接点对:
•默认(Default):选择基于多个标准,根据其中图像之间的相似性计算。
•仅适用于类似图像(Similar images only):根据关键点相似性估计相关带你对。当图像相似度具有足够的判别性时,该方法计算时间较短。
•详尽:使用所有可能的部件,建议在照片之间重叠有限的情况下使用(例如,对于摄像机设备)。穷举选择计算要密集得多(指数级上升而不是线性),所以它应该应用于少数照片(几百张)的情况。
•序列(Sequence):仅使用给定距离内的邻域对,建议在默认模式失败时处理单个照片序列。照片插入顺序必须与顺序相对应。
•循环(Loop):在循环中仅使用给定距离内的邻域对,建议在默认模式失败时处理单个循环的照片。照片插入顺序必须与顺序相对应。
我们建议您先尝试默认模式。
组件构建模式(Component construction mode)
组件构造算法可以更改为管理特定的数据集:
•单通道(One-pass):建议用于大多数数据集。
•多通道(Multi-pass):仅当单通道模式无法在主要组件中包含大量照片时才建议使用。多道次模式需要更多的计算时间。
我们建议先尝试单程模式。
分块颜色均衡(匀色)Blockwise color equalization
如果启用,将在空三步骤中对所有输入照片执行自动颜色均衡。这种均衡计算出了确保所有照片之间外观一致性的最佳方法,即使在图像之间的辐射测量差异很大的情况下也是如此。
请注意,这是两个步骤的处理流程,需要两个步骤:
1.在空中三角测量过程中激活分块颜色均衡。
2.在重建步骤中选择“跨块(Blockwise)”作为色彩均衡模式。
有关详细信息和示例结果,请参阅构建(Reconstruction)处理设置。
估算方法(Estimation methods)
根据块中的可用数据,可以根据不同的块属性选择对应的估算策略。
空三中不同属性的可用估算行为包括:
•计算(Compute:):不使用任何输入估计进行估算,
•调整(Adjust):通过调整输入估算值进行估算(根据调整后的属性,可以提出其他选项来自由管理)。
•在公差范围内调整(Adjust within tolerance):通过调整输入估算值,同时保持接近输入估算值,直至达到用户定义的公差。
•保持(Keep):使用输入的估算
光学属性估算模式(Optical properties estimation mode)
我们建议先尝试单通道(One-pass mode)模式。当空三AT失败时,多通道(Multi-pass)模式很有用,因为初始参数与实际值相差甚远(例如,未知焦距或未知大畸变)。它需要大量的计算时间。如果可能的话,最好采用更快更稳健的方法,包括导入照片组(photogroup)光学属性(importing photogroup optical properties)。
估算组(Estimation groups)
设置此选项可忽略照片组结构,并估算每个照片的相机属性。
当使用变焦镜头变焦拍摄或多摄像机系统(摄像机设备)进行图像采集时应用。
如果应用,此选项会影响空三精度。
使用此选项将产生一个输出块,每个照片一个照片组。
低级设置(Low-level settings)
低级设置只能通过加载的预设进行设置,它们可以直接控制所有的空三处理设置。
技术支持小组可提供航空三角测量预设,以解决特殊、具体问题。
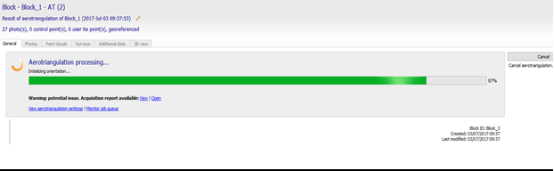
4.2.9.2 空三处理(Aerotriangulation processing)
在上一节“空三定义向导”的最后一页中,单击“提交(Submit)”以创建输出块并提交空三。

![]()
创建输出块并提交三角作业
提交空三后,将创建输出块,等待空三结果。
注意:三角测量在引擎Engine端进行。如果当前没有正在监听作业队列的引擎,则必须立即或稍后运行引擎来处理三角剖分。

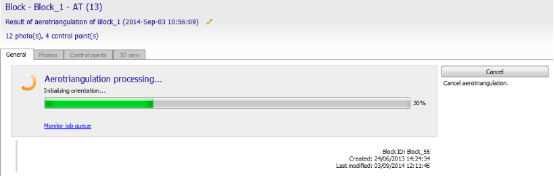
在空三过程中,块正在被创建:界面用于监视空三作业。
注意:您可以继续使用ContextCapture Master,甚至在空三正在运行或正在运行时关闭界面:作业将保留在队列中,计算将在引擎Engine端执行。
在空三过程中,会显示丢失的照片数量。如果丢失的照片太多,可以取消空三并删除块以执行具有不同设置的新空三。
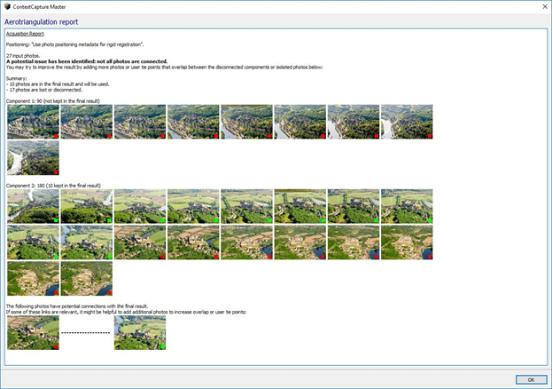
如果在计算过程中检测到潜在问题,则提供一份中期采集报告。此报告通过提供有关断开的组件和丢失的照片的信息,帮助诊断与输入数据相关的问题。

如果重叠不足或输入数据不正确,空三可能会失败。
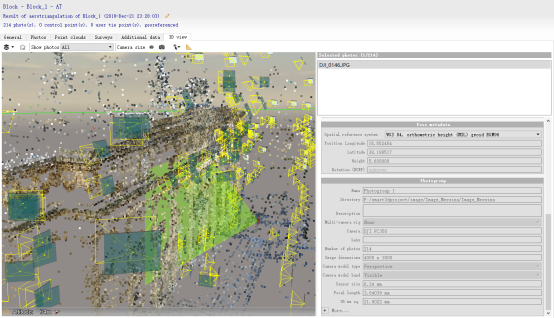
4.2.9.3 空三结果(Aerotriangulation result)
空三结果为输出块(Block):可通过块属性、空三报告和采集报告显示计算或估算的属性。

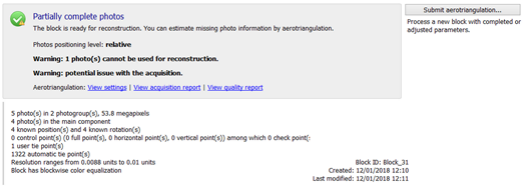
一个成功的空三应该为每一张照片计算位置和旋转。所有照片必须包含在主要组件中,以备将来的重建步骤使用。
如果重叠不充分或输入数据不适当,空三可能会丢失照片。在这种情况下,您可以:
•返回输入块,根据需要修改其属性,然后尝试新的空三;
•或将输出块用作中间结果,并尝试从此块进行新的空三,以计算缺少的属性。
在某些情况下,即使所有照片都成功地包含在输出块的主要组件中,后者也可以通过新的航空三角测量进一步改进。例如,可以在输出块中引入新的控制点,并将其用于新的空三,以对块进行地理参考。
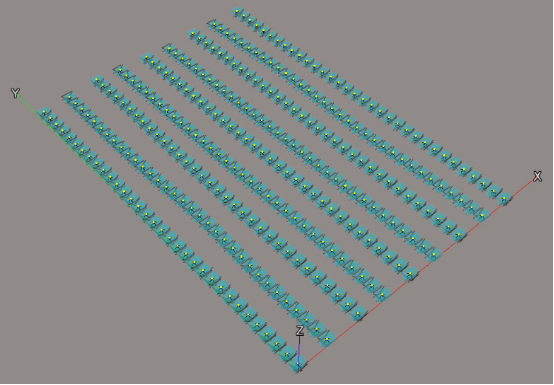
4.2.9.3.1 结果显示(Result display)
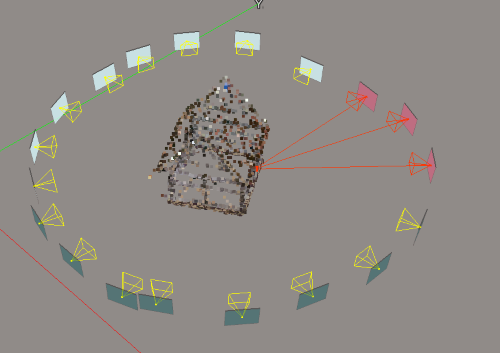
要在三维视图中浏览空三结果,请使用输出块的“三维视图”选项卡。它允许您可视化照片的位置、旋转和可视区域,以及连接点的三维位置和颜色。

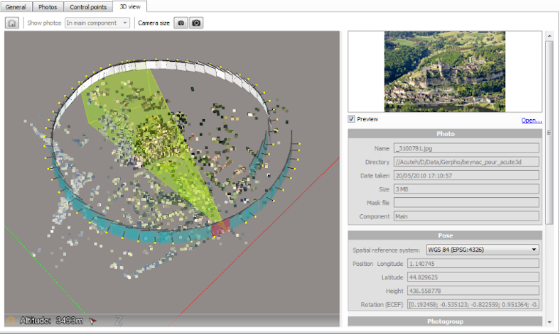
使用“照片”选项卡可以识别丢失的照片并检查估算的属性。
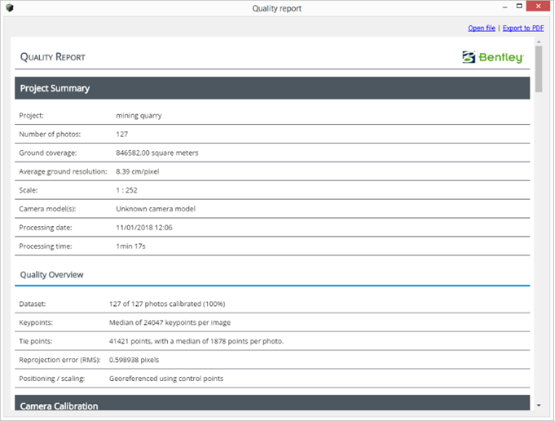
4.2.9.3.2 质量报告(Quality report)
单击“查看质量报告”链接以显示空三统计信息。
该报告显示了空三的主要属性和统计信息。

结果报告(Acquisition report)
单击链接,查看结果报告以显示与输入数据相关的潜在问题的信息。报告显示空三几个独立的过程,并提供丢失照片和结果之间潜在问题的详细信息。它还提供了需要的定位模式和引擎使用的实际模式的详细信息。

4.2.9.3.3 自动连接点检查(automatic tie points checking)
可以从自动连接点导航器检查自动连接点,以执行质量控制或识别错误(请参见自动连接点)。
4.2.9.3.4 控制点检查(Control points checking)
使用控制点时,控制点可用于进行质量控制或识别错误。
4.2.9.3.5 问题定位(trouble shooting)
如果空三出现问题,技术支持团队可能会要求您导出空三日志文件;您可以从项目树视图的块上下文菜单中导出:选择导出,导出日志文件进行技术支持。
注意:日志文件专门用于技术支持。
4.2.9.3.6 应用(Applications)
空三的结果有几种用途:
•了解场景和照片的空间结构本身很有用,
•它可以导出到XML或KML文件中,以在第三方软件中使用,
•它可用于ContextCapture执行三维重建。
4.2.10 导入视频帧(Import video frames)
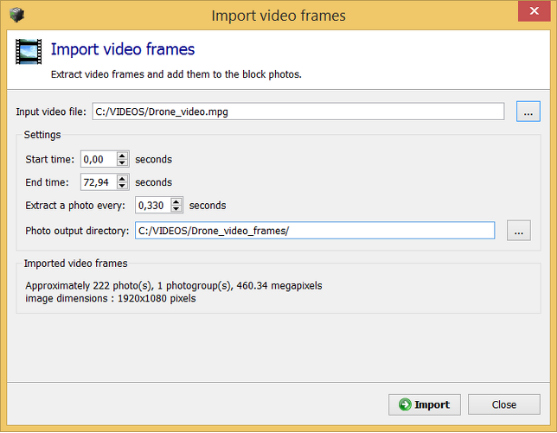
“导入视频帧”对话框(Import video frames)允许您从视频文件中提取帧并将其添加到块(Block)中。
要从视频中提取帧,请输入输入视频文件并选择导入设置:
•开始时间/结束时间(Start time/end time):仅允许导入输入视频的一部分(默认情况下,将导入所有视频)。
•采样间隔(Extract a photo every):采样间隔(秒)提取一张照片。这决定从输入视频序列中提取的照片数。
•照片输出目录(Photo output directory):创建提取照片的目录。
请选择视频采样间隔,以确保照片之间重叠度足够。

不支持变焦拍摄的视频
所有导入的帧都添加到一个唯一的照片组(photogroup)中;ContextCapture假定在所有导入的序列中使用相同的相机模型(具有相同的光学属性)。如果在视频序列中镜头缩放发生变化,请使用导入中的开始/结束设置将视频拆分为焦距不变的部分,并分别导入。
单击导入以提取和添加视频帧。
导入后可以从块的照片页单独检查提取的照片。
从视频文件导入的帧具有未知的相机模型。我们建议您在开始航空三角测量之前定义照片组(photogroup)的主要光学特性(传感器尺寸、焦距和相机型号)。也可以在相机数据库(camera database)中搜索合适的相机模型。
另请参见照片。
如果数据库中没有适合您的相机的相机模型,您可以使用ContextCapture的空三的自校准属性来查找相机模型属性。为了获得最佳效果,我们建议您使用高分辨率和制作工艺较高的360°视频。自校准后获得的相机参数可以存储在相机数据库中,并可用于更复杂的项目。
译者注:导入视频和导入照片进行模型生成的原理是一样的。视频可以更有效的保证重叠度,尤其是小物件建模。导入视频只是ContextCapture自动从视频当中提取了照片,亦可自己提取并筛选后通过导入照片的形式进行建模。
4.2.11 导入照片位置信息(Import photo positions)
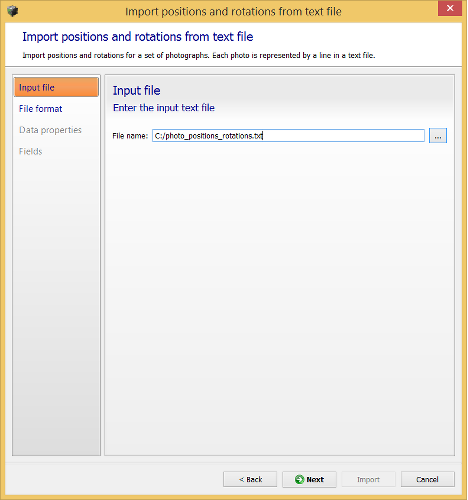
“导入照片位置”对话框允许您从文本文件导入照片位置和旋转角度。
使用此选项可应用来自第三方数据的图像位置和/或旋转。
支持各种文本文件。唯一要求是每张照片必须用一行来表示。
导入的数据必须至少包括照片参考和照片位置的3个坐标(x,y,z)。旋转角度是可选的。


译者注:建议使用CSV格式,既可以方便的使用Excel进行编辑,又可以作为纯文本文件进行处理。另外如果感觉这个步骤比较麻烦,也可以通过LSV把位置直接写入到照片。
4.2.11.1输入文件(Input file)
输入文本文件
要开始导入第三方数据,请选择输入文本文件。

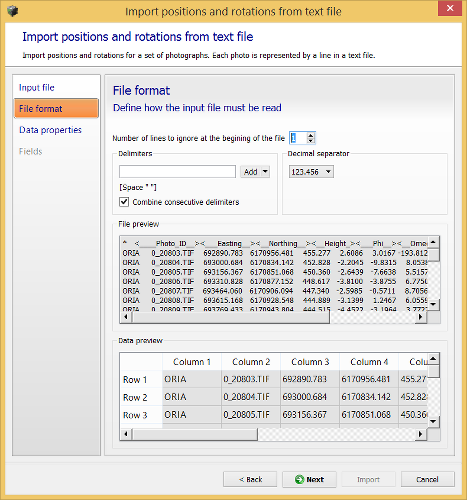
4.2.11.2 文件格式(File format)
定义必须如何读取输入文件
一旦加载了输入文件,ContextCapture将尝试对该文件的内容进行第一次解析。
可以调整导入参数,使数据预览表中的每一列都包含有意义的信息:
•文件开头要忽略的行数:定义文件头的长度,并在导入期间忽略它。
•分隔符:定义列分隔符。可以指定几个字符。
例如,当使用空格序列作为分隔符时,可能需要“组合连续分隔符”选项。
•小数分隔符:点(123.456)或逗号(123,456)。

注意:空行被忽略。
4.2.11.3 数据属性(Data properties)
定义导入数据
定义(导入位置和可选的旋转参数)的空间参考系统。
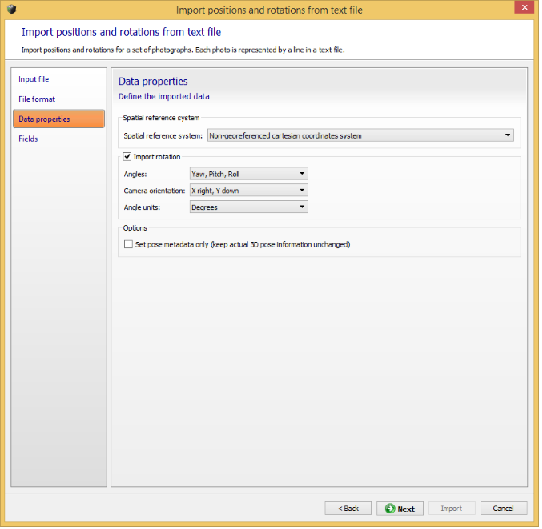

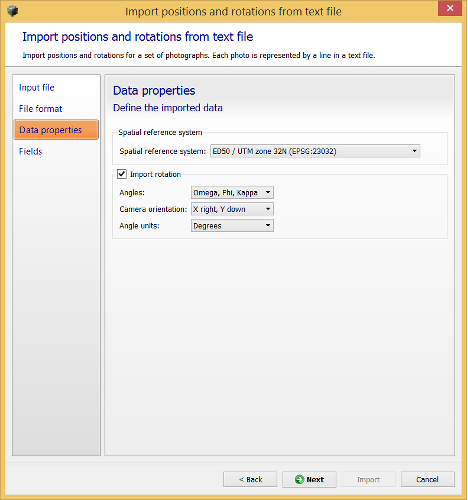

空间参照系(Spatial Reference System)
指定导入数据的坐标系
对于没有地理参考位置的数据,请选择非地理参考的笛卡尔坐标系。
输入文件旋转(Input File Rotation)
定义可选的旋转属性。
如果输入文件包含照片旋转,请选中此选项并选择旋转属性。
旋转特性为:
•角度(Angles):角度类型:Omega, Phi, Kappa, Yaw, Pitch, Roll or Heading, Pitch, Roll (deprecated).(已弃用)。
•此处不支持以矩阵形式给出的旋转。
•摄像机方向(Camera orientation):摄像机传感器的xy轴规格的姿态旋转。
可能的值有:x right y down(默认值)、x right y up(更频繁的图像测量)、x left y down、x left y up、x down y right、x down y left、x up y right、x up y left。
•角度单位(Angle units):度或弧度。
选项(Options)
其他数据属性选项。
•仅设置姿势元数据(Set pose metadata only):保持实际3D姿势信息不变。此选项可用于确保导入的位置和旋转将只影响照片位置(pose metadata)属性,并保留当前的姿态信息(如果有)。默认行为是使用导入的位置和旋转更新照片姿态属性和姿态元数据信息。
4.2.11.4 字段(Fields)
指定与导入数据对应的列
必须将每个输入列与其各自的角色相关联。
可能的角色列表适应输入数据类型。例如,如果数据不包含旋转,则不建议将角度作为可能的数据类型。
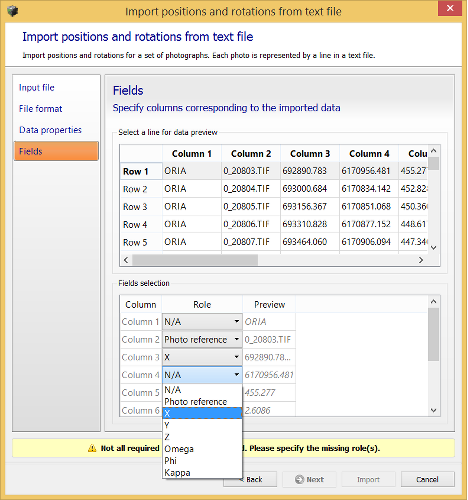

一旦每个数据类型与一个唯一的列相关联,就可以继续导入。然后,ContextCapture将尝试将每一行与块中的照片匹配,并将照片详细信息应用于匹配的照片。如果失败,错误或警告消息将提醒您该问题,您可以选择取消该操作。
只有当“导入位置和旋转”方法包含完整的照片名称时,该方法才能将块的照片与其对应的文本行匹配。
例如,对于名为img_0.tif的照片,相应的照片引用必须是img_0或img_0.ext,其中ext是任意扩展名。
4.2.12 导入块(Import blocks)
从XML或MS Excel XLS文件导入完整或部分块(Block)。
注意:导入完整的块(Block)定义是使用ContextCapture处理大量照片的唯一方法。
支持两种导入格式:
•blocksExchange XML格式:Bentley指定的用于导入/导出块(Block)定义的开放交换格式。
了解有关块更改XML格式的详细信息。
•MS Excel XLS格式:基于Microsoft Excel XLS文件的定义。
了解有关MS Excel块定义的详细信息
无法在ContextCapture中重新导入ATexport XML导出的文件。

译者注:xml作为一个交换格式,是Smart3d工程调整,或者备份的一个方式,支持导出后重新导入,这是不是很明白文档说的不支持重新导入是什么情况。
4.2.13 导入调查数据(Import surveys data)
可以从XML格式的调查数据(surveys data)导入块Block中的控制点、用户连接点和定位约束。
另请参见:导出调查数据。
4.2.14 分割块(Split block)
要处理包含大量照片(通常大于5000张)的航空图像块(Block),需要将一个块分割为多个子块。
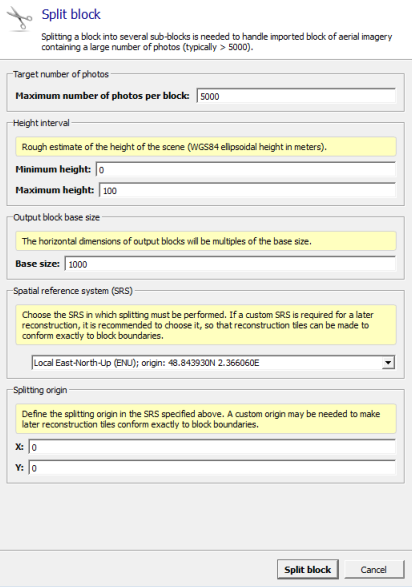

4.2.14.1 分割设置(Split settings)
不得指定海拔高度。有关更多信息,请参阅有用的概念。
目标照片数(Target number of photos)
输入你需要的输出块最大照片数限制。
高度间隔(Height interval)
输入场景椭圆体高度间隔的粗略估计。
输出块基本大小(Output block base size)
输入输出块的基本大小。输出块的实际尺寸将是该基本尺寸的倍数。
例如:
基本大小(Base size):500
实际输出块大小可以是:500、1000、1500…取决于场景内容和其他拆分设置。
空间参考系(Spatial reference system (SRS))
对于需要拆分的块选择SRS。
默认情况下,使用本地东北向上(East-North-Up)系统,在输入块的照片位置的质心处设置坐标原点。
如果以后的重建需要自定义SRS,建议选择它,以便重建的Tile瓷砖完全符合块边界。
拆分坐标原点(Splitting origin)
在指定的SRS中定义拆分原点。
可能需要自定义原点以使以后的重建Tile完全符合块边界。
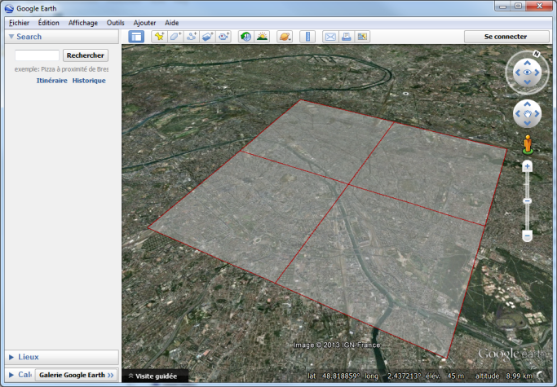
4.2.14.2 分割处理(Split processing)
单击拆分块(Split)开始拆分处理。
split根据一个规则的二维网格将空三块分为多个部分。
要对所有部分执行重建,必须注意进一步的重建(Reconstruction)空间框架设置,以便获得兼容的Tile分割和坐标系。
在定义一个块重建(Reconstruction)时,请定义以下空间框架:
•使用相同的SRS定义所有重建空间框架。
•使用规则平面网格作为平铺模式
•使用分块大小一致的Tile。
•使用(0;0)或块大小的倍数作为自定义平铺原点坐标。
•使用块对应的兴趣区域。
拆分报告中会提醒足够的重建空间框架设置,并在每个块部件的描述中调用这些设置。
注意:拆分后,可以卸载父块以节省内存和加载/保存时间(右键单击>卸载)。另请参见加载/卸载块。
分割过程还生成了一个kml文件,用于获得计算后的子块区域的概述。
在项目文件夹myblock-sub block regions.kml中可以访问kml文件。

4.2.15 提取块(Extract block)
根据给定区域提取一个保护该区域数据子块(Block)。
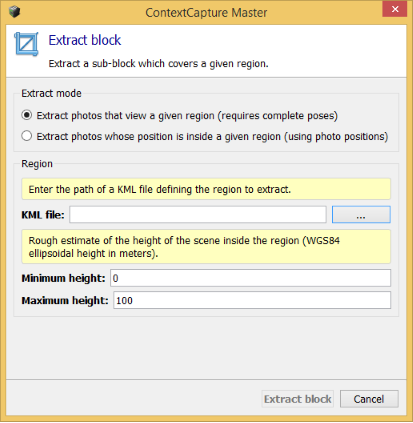

提取设置(Extract settings)
有两种提取模式:
•提取拍到了给定区域的照片(需要完整的姿势)。
•提取位于给定区域内的照片(使用照片位置)。
区域(Region)
输入提取模式所需的区域参数:
- KML文件:输入定义要提取区域的kml文件的路径。您可以使用任何地理信息系统工具或谷歌地球创建一个kml文件。
- 高度间隔(Height interval):输入场景区域内椭球体高度间隔的粗略值。注:您不能指定海拔高度。有关更多信息,请参阅有用的概念。
- 外扩(米):如果要扩展所选区域,请输入一个外扩的边距。
提取处理(Extract processing)
单击提取块(Block)开始提取处理。
提取会创建一个新的子块(Block),该子块(Block)限于由kml文件定义的2d区域。
注意:提取后,可以卸载父块以节省内存和加载/保存时间(右键单击>卸载)。
另请参见加载/卸载块。
译者注:提取的过程,与3Dview当中选择照片删除的功效是一样的,只是一个便捷工具,可以结合使用,建议剔除错误照片(飞机起降过程拍摄的照片,或者返航途中拍摄的)。错误的照片不仅会造成空三时间长,还很容易出错。
4.2.16 导出块(Export block)
块可以以XML的格式进行导出
译者注:无论是否执行了空三,都可以直接导出,xml是交换格式,如果导出kml后在LSV当中进行数据预览也是可以结合底图查看照片的分布。
4.2.16.1导出XML(Export to XML)
菜单块>导出>导出到XML(Menu> Block > Export > Export to XML)
以各种XML格式导出块属性。
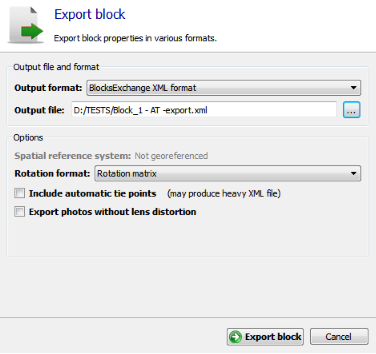

选择输出格式、输出文件地址和选项;然后单击导出块以创建XML文件。
支持以下输出格式:
•blocksChangeXMLFormat:由Bentley指定的用于导入/导出块定义的开放交换格式。了解有关块更改XML格式的详细信息。
•导出XML格式(ATExport XML format):以XML格式导出块主要属性。进一步了解ATexport XML格式。
ATexport XML格式是一种仅用于导出到第三方软件的简化格式。如果以后要重新导入到ContexCapture中,则必须使用BlocksChange XML格式。
根据所选格式和块属性,可以使用以下选项:
•空间参照系(Spatial reference system):选择用于写入三维位置和旋转的坐标系(仅适用于地理参照块)。
•旋转格式(Rotation format):选择旋转的书写方式,Rotation matrix or Omega, Phi, Kappa angles(仅适用于已知旋转的块)。
•相机方向(Camera orientation):选择旋转的轴约定(仅适用于已知旋转的块)。
•包括自动连接点(Include automatic tie points):在导出中包括自动连接点。
导出自动连接点可能会产生大体积的XML文件。
•导出不失真的照片(Export photos without lens distortion):根据块的畸变数据不失真的照片,并导出到子目录中的JPG文件。
不使用lens distertion导出照片可能会产生大量文件。
4.2.16.2 导出KML(Export to KML)
菜单块>导出>导出到kml(仅适用于地理参考块)(Menu Block > Export > Export to KML)
将照片位置和一些其他属性导出到kml文件。
导出的kml文件适用于在标准地理信息系统工具或谷歌地球中可视化照片位置。

4.2.16.3 导出附加数据(Export surveys data)
菜单 块>导出>导出测量数据(Menu Block > Export > Export surveys data)
将控制点和用户连接点导出到XML或KML(仅限地理参考块的KML)。
导出的kml文件适用于在标准地理信息系统工具或谷歌地球中可视化照片位置。
XML格式适用于块或项目之间交换调查(包括控制点和带有测量和定位约束的用户连接点)。
4.2.17 加载/卸载Block(Load/unload blocks)
从当前项目加载/卸载块(Block)。
您可以使块(Block)在项目中暂时不可用,需要的时候再恢复它们。
卸载块可以节省内存并减少项目加载时间。
卸载块的步骤(To unload blocks from a project)
在项目树视图中,选择要从当前项目中卸载的块(Block)。右键选择卸载(Unload)

块现在显示为已卸载,其在项目树视图中的图标显示灰色。
将块(Block)加载到项目中(To load blocks into a project)
在项目树视图中,选择一个未加载的块(Block)。右键选择“加载”(load)。
该块(Block)现在可在当前项目中使用。
译者注:对于数据量大的项目,可能需要多次空三,以及分块,如果项目打开时间已不可接受,就卸载暂时用不到的块(Block),卸载后树结构看起来也会清爽很多。
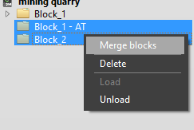
4.2.18 合并块(Merge blocks)
将所选块(Block)合并到一个新块(Block)中。
通过使用SHIFT或CTRL键在项目树视图中多选来定义输入块。右键合并块(Merge Blocks)。
注:只有当几个块对位置信息是否包含是一致的(例如,如果所有选定的块都是带地理参照的),才能合并这些块。

4.2.19 XML 格式的块交换(BlocksExchange XML format)
BlocksExchange XML格式是Bentley为在ContextCapture Master中导入/导出块定义而指定的开放交换格式。
XML文件可以包含一个或多个块的属性。

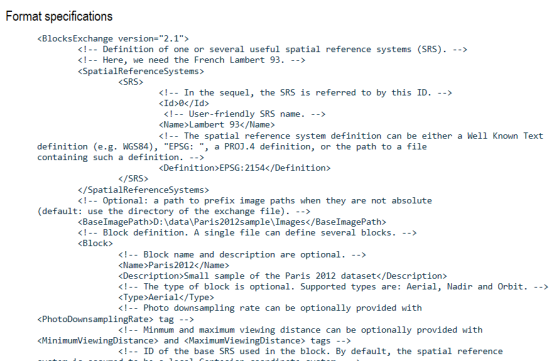
可以在ContextCapture安装目录中找到上述示例和规范文件
4.2.20 Excel格式定义块(MS Excel block definition)
块Block定义可以根据Bentley指定的MS Excel规范编写导入。
此格式是为了方便从现有的XLS或XLSX格式的MS Excel文档中导入块(Block)。但是,我们建议您在一般情况下使用更灵活的blocksExchange XML格式。
在MS Excel文件中,块(Block)定义可以是部分的或完整的,数据可以以不同的形式组织。
您可以在ContextCapture安装目录中找到一个示例和模板:
•doc/blockimportsample.xls
•doc/BlockImportTemplate.xls
数据表(Data worksheets)
在Excel文件中,数据由多个工作表提供。
XLS format is limited to 16384 rows, use XLSX format instead if you want to import larger dataset.
注:XLS格式限制最多16384行,如果要导入更大的数据集,请改用XLSX格式。
照片组(Photogroups )
具有相应参数的照片组(PhotoGroup)列表:
•名称(Name):此照片组(PhotoGroup)的唯一名称(必填)
•宽度、高度(Width, Height):以像素为单位的图像大小(必填)
•焦距(FocalLength):焦距(mm)(必填)
•传感器尺寸或像素尺寸(SensorSize or PixelSize):单位:mm(必填)
•主点X,主点y(PrincipalPointX, PrincipalPointY:):以像素为单位的主点位置(选填)
•主点X-mm,主点y –mm(PrincipaPointlXmm, PrincipalPointYmm):以mm为单位的主点位置(选填)
•相机姿态(cameraOrientation):摄像头方向参考,请参见blocksXchange XML格式(选填)
•k1、k2、k3、p1、p2:透镜畸变系数(选填)
照片(Photos )
带相应参数的照片列表:
•名称(name):文件名(必填)
•照片组(photogroupname):所属照片组(photogroupname)的名称(必填)
•路径(Directory):基本目录(选填)
•扩展名(Extension):文件后缀(选填)
•经度、纬度、高度或东距、北距、高度(Longitude, Latitude, Height or Easting, Northing, Height):3D位置(选填)
•Omega、Phi、Kappa或Yaw、Pitch、Roll或Heading、Roll、Pitch:拍照时的姿态,根据选项以度或弧度表示(可选)
照片名可以是绝对路径、相对路径或文件名:
实际照片路径是使用可选选项baseimagepath、可选照片目录、照片名称和可选扩展名组合的。
控制点(ControlPoints )
带名称和三维位置信息的控制点列表。
要提供控制点测量值,请改用blocksXchange XML格式。
选项(Options )
用于解释MS Excel文件的选项。
空间参考系统(SRS)
空间参考系统用于解释3D位置和旋转信息
支持EPSG code ("EPSG:XXX"), PROJ.4或 WKT定义
(使用弧度)InRadians
指定旋转角度单位请使用弧度而不是度
基础路径(BaseImagePath )
可选路径选项用来构建照片的绝对路径
块类型(BlockType )
可选性
4.2.21 空三导出XML格式(ATExport XML format)
空三导出的XML文件包含每张照片的内部和外部姿态数据:
•照片路径(image path):图像文件路径
•图像尺寸(ImageDimensions):以像素为单位的图像宽度和高度
•摄像机型号(CameraModelType):透视或鱼眼相机型号
•焦距(FocalLength):焦距(像素)
•鱼眼焦点矩阵(FisheyeFocalMatrix):仅用于鱼眼相机的像素焦点矩阵
•图像纵横比(AspectRatio):图像纵横比
•扭曲(Skew):图像扭曲,
•主点(PrincipalPoint):图像中的主点位置,以像素为单位
•畸变(Distortion):仅用于透视相机镜头畸变系数
•鱼眼畸变(FisheyeDistortion):仅用于鱼眼相机透镜畸变系数,
•旋转(Rotation):照片旋转(如果有地理参考,见ECEF)
•中心(Center):照片中心位置位置(如果有地理参考,在ECEF中给出)。
•倾斜(Skew):定义X和Y像素轴之间角度的倾斜系数。
•纵横比(Aspect ratio):如果像素不是正方形,则与1不同。
空三导出的 XML格式仅用于导出到第三方软件。如果以后要在ContextCapture中重新导入块,则必须使用Blocks Exchange XML格式。
译者注:此处貌似严格区分普通Block和空三后的Block的导出,感觉介绍的有点乱
4.2.22 相机数据库(Camera database)
相机数据库管理相机模型列表,这些相机信息ContextCapture会自动在添加照片时会应用,或者您可以在照片组(PhotoGroup)上输入。
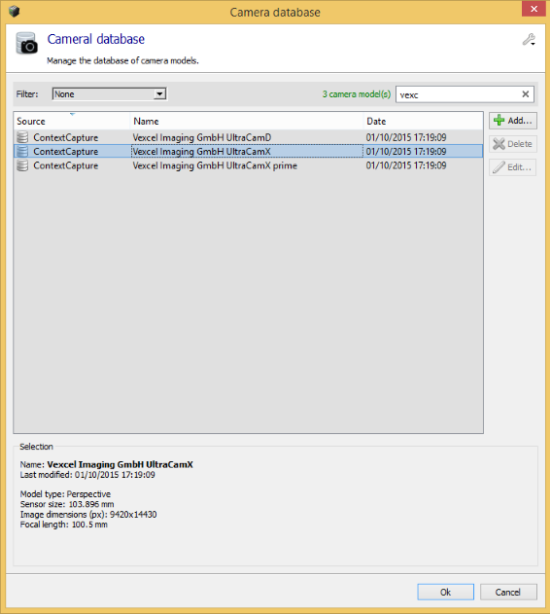

相机数据库(camera database)包含两项:
•ContextCapture项是ContextCapture提供的相机型号。这些项目是只读的,ContextCapture相关团队每天更新该列表。
•用户项(User items)是您在计算机上添加或导入的相机型号。
每个相机模型由名称(别名)、日期(上次修改)、各种(可选)光学属性和搜索/匹配条件组成。
有关光学特性的详细信息,请参见光组特性。

4.2.22.1添加照片时自动应用相机模型Apply a camera model automatically when adding photos
从块(block)的“照片”选项卡添加照片时,ContextCapture自动使用相机数据库为添加的照片获取最匹配的相机模型。
ContextCapture使用输入照片属性(Exif数据和图像尺寸)根据其属性和匹配条件在数据库中查找最佳相机模型。
注意:会优先应用最新的相机模型。
将相机模型手动应用于照片组
有关其他信息,请参见将相机模型手动应用到照片组。
译者注:此处Exit应是书写错误是指照片的Exif信息
4.2.22.2手动应用相机模型于照片组Apply a camera model manually to a photogroup
添加照片后,还可以手动从数据库中查找给定照片组的相机模型:
1.右键单击照片组-》get camera model from the database从数据库调用相机模型camera model

2. 在“相机数据库”对话框,可以用提供的过滤器的检索到合适的相机模型。

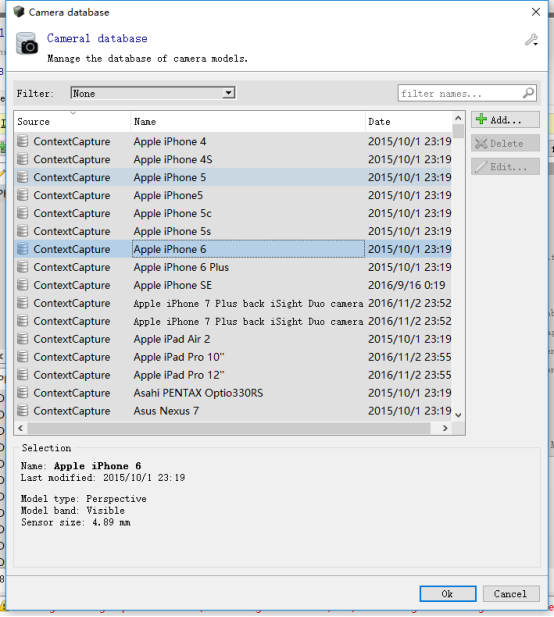
3.单击“确定”将选定的相机模型应用于照片组(photoGroup)。
4.2.22.3 管理用户相机模型库(Manage the user camera database)
访问和管理用户相机数据库有两种方法:
•在照片组(photogroup)级别,从块(Block)的“照片”选项卡。此访问模式允许您快速将照片组的相机模型添加到数据库中。
•在应用程序级别,从ContextCapture选项:工具(tools)>选项(option)>管理相机数据库(manage camera database)。此模式可用于更复杂的操作,如编辑或删除以前添加的相机模型。

编辑相机数据库(Editing the camera database)
可以从ContextCapture选项中访问相机数据库对话框:菜单选项>管理相机数据库。使用此对话框,可以添加新用户项,编辑或删除现有项。
请注意,ContextCapture自带的项不可编辑。
导入/导出用户相机数据库
要保存自定义项或将其移动到其他计算机,可以使用“工具”菜单中提供的导入/导出功能。