Smart3D帮助文档第12节 空三结果报告
4.2.9.2 空三处理(Aerotriangulation processing)
在上一节“空三定义向导”的最后一页中,单击“提交(Submit)”以创建输出块并提交空三。
创建输出块并提交三角作业
提交空三后,将创建输出块,等待空三结果。
注意:三角测量在引擎Engine端进行。如果当前没有正在监听作业队列的引擎,则必须立即或稍后运行引擎来处理三角剖分。
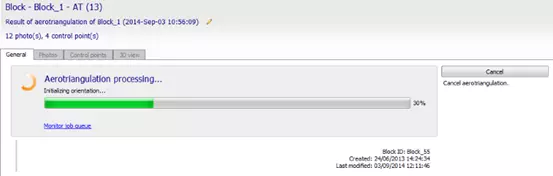
在空三过程中,块正在被创建:界面用于监视空三作业。
注意:您可以继续使用ContextCapture Master,甚至在空三正在运行或正在运行时关闭界面:作业将保留在队列中,计算将在引擎Engine端执行。
在空三过程中,会显示丢失的照片数量。如果丢失的照片太多,可以取消空三并删除块以执行具有不同设置的新空三。
如果在计算过程中检测到潜在问题,则提供一份中期采集报告。此报告通过提供有关断开的组件和丢失的照片的信息,帮助诊断与输入数据相关的问题。
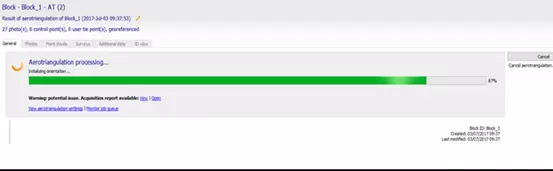
如果重叠不足或输入数据不正确,空三可能会失败。
4.2.9.3 空三结果(Aerotriangulation result)
空三结果为输出块(Block):可通过块属性、空三报告和采集报告显示计算或估算的属性。
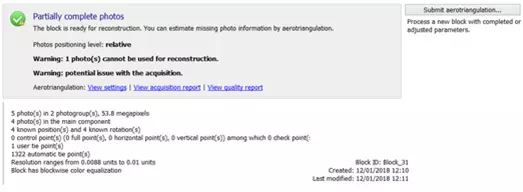
一个成功的空三应该为每一张照片计算位置和旋转。所有照片必须包含在主要组件中,以备将来的重建步骤使用。
如果重叠不充分或输入数据不适当,空三可能会丢失照片。在这种情况下,您可以:
•返回输入块,根据需要修改其属性,然后尝试新的空三;
•或将输出块用作中间结果,并尝试从此块进行新的空三,以计算缺少的属性。
在某些情况下,即使所有照片都成功地包含在输出块的主要组件中,后者也可以通过新的航空三角测量进一步改进。例如,可以在输出块中引入新的控制点,并将其用于新的空三,以对块进行地理参考。
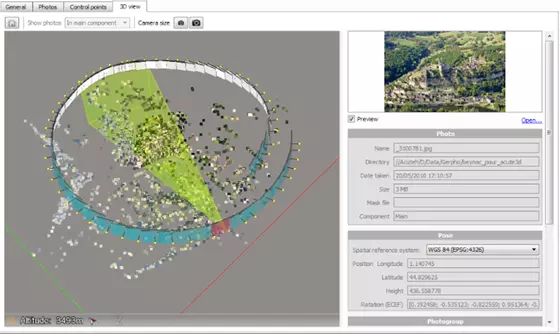
4.2.9.3.1 结果显示(Result display)
要在三维视图中浏览空三结果,请使用输出块的“三维视图”选项卡。它允许您可视化照片的位置、旋转和可视区域,以及连接点的三维位置和颜色。
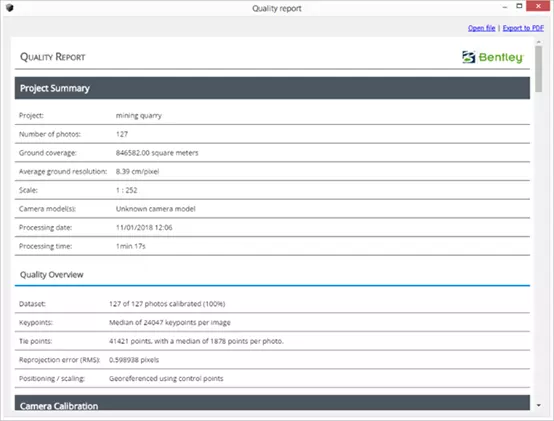
4.2.9.3.2 质量报告(Quality report)
单击“查看质量报告”链接以显示空三统计信息。
该报告显示了空三的主要属性和统计信息。
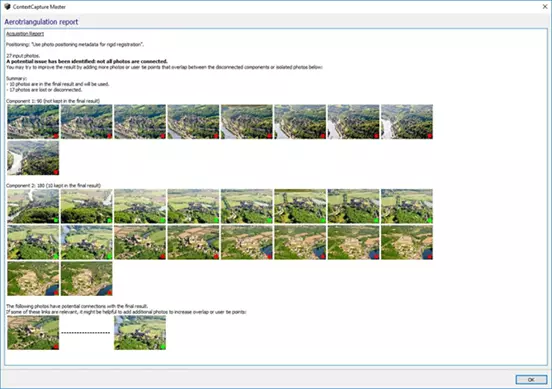
结果报告(Acquisition report)
单击链接,查看结果报告以显示与输入数据相关的潜在问题的信息。报告显示空三几个独立的过程,并提供丢失照片和结果之间潜在问题的详细信息。它还提供了需要的定位模式和引擎使用的实际模式的详细信息。
4.2.9.3.3 自动连接点检查(automatic tiepoints checking)
可以从自动连接点导航器检查自动连接点,以执行质量控制或识别错误(请参见自动连接点)。
4.2.9.3.4 控制点检查(Control points checking)
使用控制点时,控制点可用于进行质量控制或识别错误。
4.2.9.3.5 问题定位(trouble shooting)
如果空三出现问题,技术支持团队可能会要求您导出空三日志文件;您可以从项目树视图的块上下文菜单中导出:选择导出,导出日志文件进行技术支持。
注意:日志文件专门用于技术支持。
4.2.9.3.6 应用(Applications)
空三的结果有几种用途:
•了解场景和照片的空间结构本身很有用,
•它可以导出到XML或KML文件中,以在第三方软件中使用,
•它可用于ContextCapture执行三维重建。